Academic Members:
- Dr Wai-keung Fung (Head)
- Dr Shadan Khan Khattak
- Dr Ahmed Khalifa
- Dr Abdullah Alhusin Alkhdur
Funding:
- Get Started Fund 2020/21: Robot Learning from Demonstration and Skill Transfer [£2,500]
PI: Dr Wai-keung Fung
- Hong Kong Jockey Club Fellowship: 2020/21: Automated Assessment System for Remote Robot Laboratory Platform [£5,000]
PI: Dr Wai-keung Fung
- Get Started Fund 2021/22: Subterranean Platoon of Mobile Robots for Inspection and Maintenance [£3,000]
PI: Dr Ahmed Khalifa
On-going Projects:
1. Learning from Demonstration (LfD) Experimental Platform:
Project Supervisor: Dr Wai-keung Fung
Student Interns: Tony Wilett and Mussa Em Salem Abulaid [recruiting]
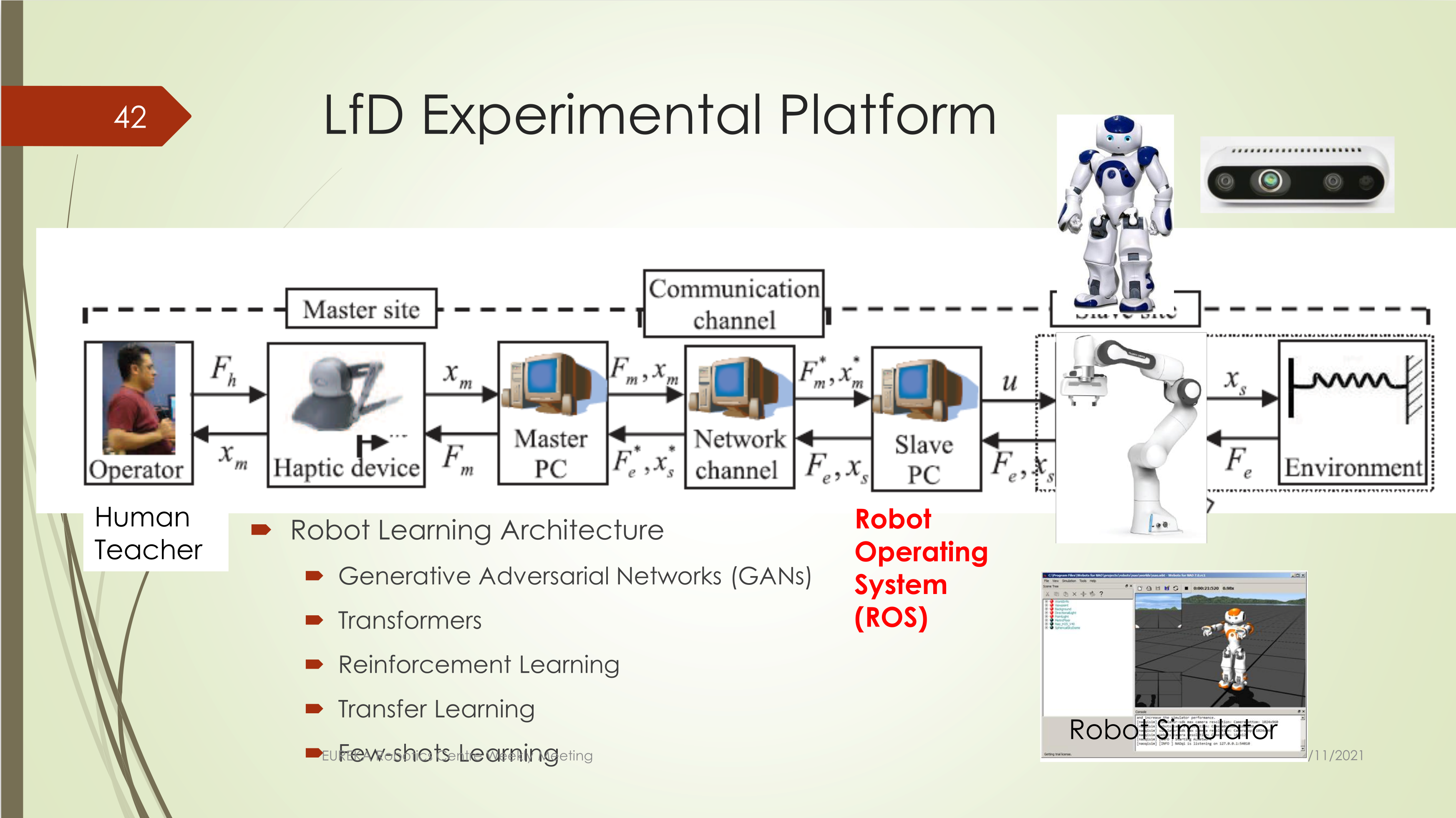
Summary: A LfD experimental platform is composed of a haptic device, depth camera, tracking camera, and robots at EUREKA Robotics Centre, including Franka Panda arm, mobile robots, and/or Sony NAO humanoid robots. Through this experimental platform, human teachers can demonstrate various robot behaviours/skills using the haptic device remotely and real-time haptic feedback can also be rendered to humans based on force/torque sensor data acquired. Moreover, performance of different robot behaviour and skill learning algorithms can be compared based on the same robot learning scenarios. The first step is to develop a LfD testbed so that the Franka Panda arm can be taught remotely by a haptic device and the depth camera and/or tracking camera provides visual and augmented force feedback to human teachers.
2. Remote Robotics Laboratory:
Project Supervisor: Dr Wai-keung Fung
Student Interns: [recruiting]
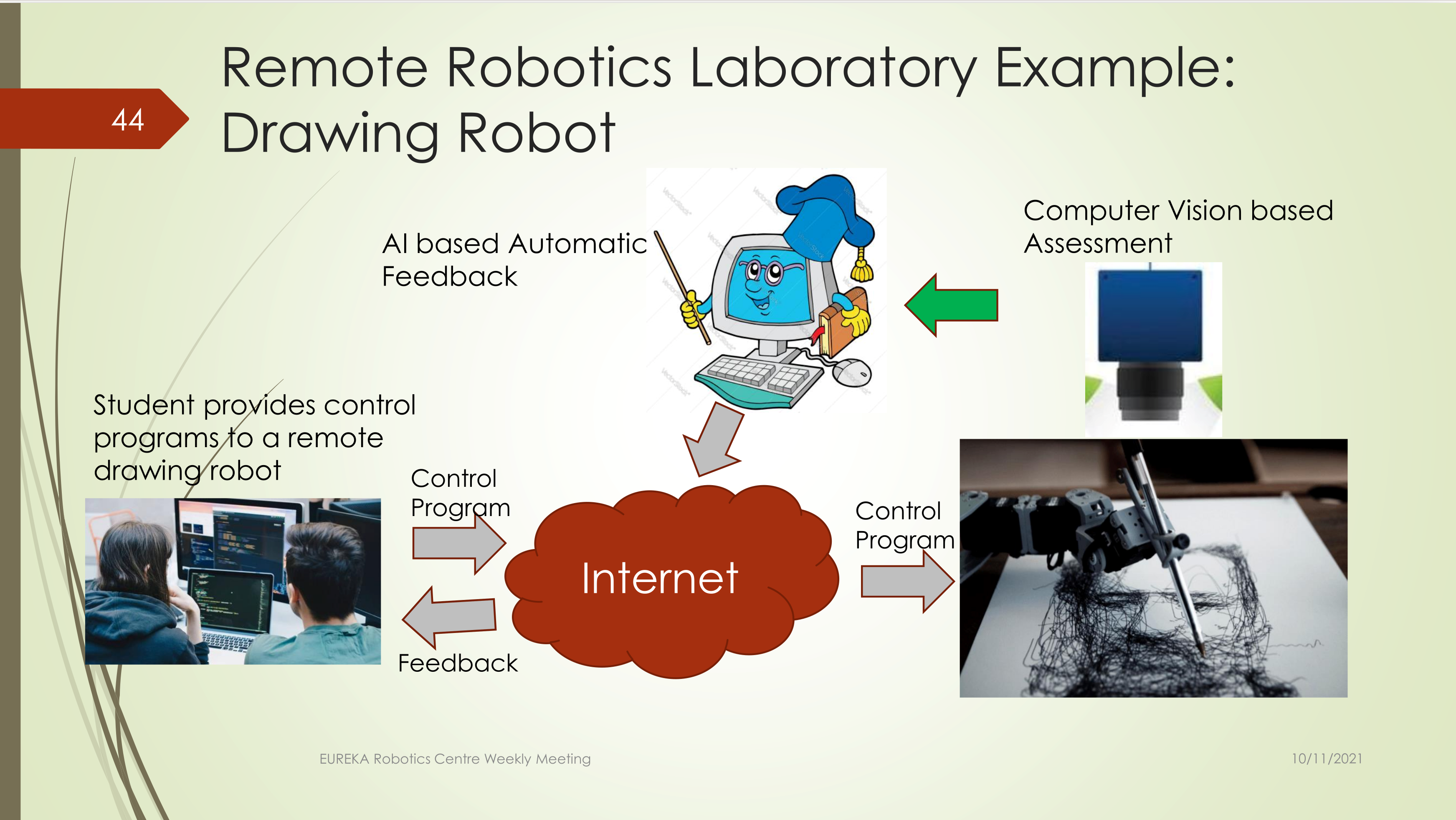
Summary: Education has been facing various challenges recently due to pandemic. Face-to-face meetings in class delivery have been drastically reduced or even cancelled due to city lockdown for the COVID-19 pandemic. Especially STEM education relies heavily on laboratory sessions and workshop training for equipping students with practical and experimental skills. These sessions are most effectively delivered through live demonstration with hardware equipment to small groups of students so that instructors are able to provide immediate feedback to students' performance on assigned tasks. However, these practical sessions cannot be effectively delivered traditionally during pandemic situation. The remote laboratory concept has been developing in recent years to enable students to conduct experiments using remote experimental platforms via the Internet for online distance learning. With the help of remote laboratory, students can continue to acquire practical and hands-on skills online through performing experiments with remote experimental platforms under the supervision of instructors. This project will focus on developing automatic assessment feedback system for remote robotics laboratory platform using advanced computer vision and artificial intelligence (AI) technologies for the remote robot platform.
3. Robust Intelligence in Robotics:
Project Supervisor: Dr Wai-keung Fung
Student Interns: [recruiting]
Summary: Human is well known to be good at reasoning and making decision based on uncertain information, but robots are not. Uncertainty in information acquired from the environments comes from sensor noise, ambiguity from different sensing modalities, changing environments and so on. The objective of this research program is to develop a framework for autonomous robots to have the competence to accomplish tasks robustly in unknown environments based on imprecise, incomplete, and sometimes conflicting information. A robot environment representation based on fuzzy sets theory will be investigated. Fuzzy Boundary Representation (Fuzzy B-Rep) basically describes the dynamic boundary of open space for robots to traverse. Techniques for generation and update of Fuzzy B-Rep based on uncertain sensor information will be developed. Five core problems in mobile robotics (ground, aerial, underwater) will be addressed, namely mapping, path planning, navigation & collision avoidance, localisation and SLAM (Simultaneous Localisation and Mapping) and extension to multi-robot coordination scenarios will also be investigated. Other uncertainty.
4. Digital Twin of Robots in action:
Project Supervisor: Dr Wai-keung Fung
Student Interns: [recruiting]
Summary: Sensor based automatic generation and update of application specific Robot Operating Environment Models and dynamics (for wheeled, legged, aerial, underwater robots), Physics based Simulation, Surrogate Modelling for robot environment interaction and inter-robot interaction (in meter, micrometer or nanometer scales).
5. Shared Autonomy:
Project Supervisor: Dr Wai-keung Fung
Student Interns: [recruiting]
Summary: Developing statistical latent factor models on the effects of AI decision making, control algorithms and communications channel quality to robot performance in networked robot systems using interactive network simulation. Adaptive planning/control task load distribution between remote robots and supervisory console. Network resource allocation across multi-robot collaboration system and robot swarms.
- Subterranean Platoon of Mobile Robots for Inspection and Maintenance:
Project Supervisor: Dr Ahmed Khalifa
Student Interns: [recruiting]
Back to EUREKA Robotics Centre Homepage